l298n motor driver
L298n motor driver merupakan suatu modul motor driver yang digunakan untuk mengontrol kecepatan dan arah putaran motor DC. Modul ini sangat populer dan sering dihubungkan ke mikrokontroler arduino.
Seperti namanya motor driver ini menggunakan IC L298n, dengan konstruksi rangkaian H - Bridge. Maka dari itu rangkaian ini dapat mengendalikan beban induktif pada kumparan. Seperti kita tahu bahwa motor listrik terdiri dari lilitan kumparan sehingga memiliki beban induktif yang sangat besar. Kemudian dalam rangkaian IC tersebut terdapat transistor transistor logic (TTL) dengan gerbang NAND yang berfungsi untuk merubah arah putaran motor.
l298n pinout
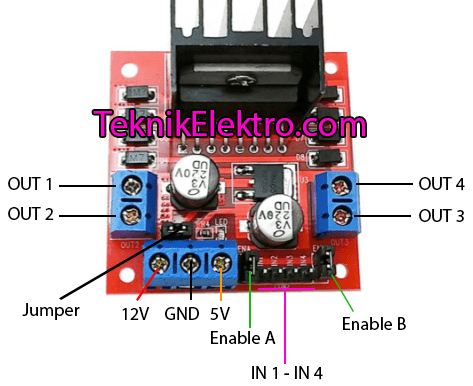
l298n Pin :
- Pin OutMerupakan suatu pin yang digunakan untuk menghubungkan ke kutub motor. Karena pin ini dihubungkan ke motor maka tidak ada kutub negatif dan positif sehingga pemasangan kabel ke kutub motor bisa dibalik - balik.
- Pin IN
Suatu pin yang dihubungkan ke pin Digital Arduino. Pin ini digunakan untuk mengatur arah putaran motor yang dihubungkan ke driver l298n.
Contohnya apabila IN1 HIGH dan IN2 LOW, Maka motor berputar searah jarum jam.
Namun apabila IN1 LOW dan IN2 HIGH, Maka motor berputar berlawanan arah jarum jam.Nilai logika LOW dan HIGH pada pin IN ini akan diatur pada coding arduino. - Pin Enable
Merupakan suatu pin yang digunakan sebagai sumber tegangan tambahan motor DC agar kecepatan motor meningkat. Misalkan kita menghubungkan tegangan 12 Volt ke pin Enable tersebut maka kecepatan motor akan meningkat.
Pin enable A digunakan untuk meningkatkan tegangan dan kecepatan motor sebelah kiri (Output 1 dan 2), sedangkan pin enable B digunakan untuk meningkatkan tegangan dan kecepatan motor sebelah kanan (Output 3 dan 4). - Pin 12 VPin yang digunakan untuk menghubungkan ke sumber tegangan baterai 12 Volt DC.
- Pin 5 VPin yang digunakan untuk menghubungkan ke sumber tegangan baterai 5 Volt DC.
- Pin GNDDigunakan untuk menghubungkan ke ground Arduino.
- Pin Jumper
Digunakan untuk menghubungkan ke sumber tegangan tambahan apabila kecepatan motor kurang.
Motor driver l298n arduino

Gambar diatas merupakan rangkaian dari Motor l289n Arduino, dimana pada gambar terlihat bahwa :
- Module l298n disupply oleh Daya 5 Volt DC dari Arduino.
- Arah putaran motor sebelah kanan dan kiri berbeda dikarenakan sambungan kabel pada kutub motor untuk tegangan positif dan negatif berbeda.
- Seperti kita ketahui untuk merubah arah putaran pada motor DC, Kita tinggal merubah sambungan kutub positif dan negatif pada motor.
Catatan :
- Suppy daya dari modul l298n tidak harus menggunakan 5 volt arduino, bisa menggunakan baterai 5 Volt atau baterai 12 Volt yang akan dihubungkan ke Pin 12 Volt modul l298n.
- IN1 dan IN2 digunakan untuk mengatur arah putaran Motor Sebelah Kiri
- IN3 dan IN4 digunakan untuk mengatur arah putaran Motor Sebelah Kanan
Program Motor DC Arduino
- Jika ingin mengatur kecepatan motor dengan sambungan Enable A atau Enable B
//TeknikElektro.com
#define EnA = 10;
#define EnB = 5;
#define In1 = 9;
#define In2 = 8;
#define In3 = 7;
#define In4 = 6;
void setup()
{
//Inisiasi Input dan Output
pinMode(EnA, OUTPUT);
pinMode(EnB, OUTPUT);
pinMode(In1, OUTPUT);
pinMode(In2, OUTPUT);
pinMode(In3, OUTPUT);
pinMode(In4, OUTPUT);
}
void goStraight() //Putaran Motor Searah Jarum Jam
{
// turn on motor A
digitalWrite(In1, HIGH);
digitalWrite(In2, LOW);
// set speed to 150 out 255
analogWrite(EnA, 200);
// turn on motor B
digitalWrite(In3, HIGH);
digitalWrite(In4, LOW);
// set speed to 150 out 255
analogWrite(EnB, 200);
delay(2000);
// now turn off motors
digitalWrite(In1, LOW);
digitalWrite(In2, LOW);
digitalWrite(In3, LOW);
digitalWrite(In4, LOW);
// Jika ingin merubah putaran motor, Ganti nilai IN1 dan IN2 (Untuk Output Kiri), IN3 dan IN4 (Untuk Output Kanan).
}
void loop()
{
goStraight();
delay(1000);
}
- Tidak Menggunakan Pin Enable A dan Enable B
//TeknikElektro.com
//Inisiasi Input dan Output
int IN_1 = 4;
int IN_2 = 5;
int IN_3 = 6;
int IN_4 = 7;
void setup()
{
//mendefinisikan control pin sebagai output
pinMode(IN_1, OUTPUT);
pinMode(IN_2, OUTPUT);
pinMode(IN_3, OUTPUT);
pinMode(IN_4, OUTPUT);
}
void loop()
{
//Untuk Motor 1 Sebelah Kiri putaran searah
digitalWrite(IN_1, HIGH);
digitalWrite(IN_2, LOW);
//Untuk Motor 2 Sebelah Kanan putaran berlawanan arah
digitalWrite(IN_3, LOW);
digitalWrite(IN_4, HIGH);
}
Cara Kerja l298n

Gambar diatas merupakan rangkaian IC l298n yang mana merupakan rangkaian H - Bridge. Aturan rangkaian H Bridge in adalah :
- Pada motor DC, untuk membalik arah putaran motor maka kita cukup membalik sambungan kutub negatif dan positif.
- Terlihat pada gambar ketika saklar S1 dan S4 terhubung, saklar S2 dan S3 terputus maka arah putaran motor searah jarum jam.
- Terlihat pada gambar ketika saklar S1 dan S4 terputus, saklar S2 dan S3 terhubung maka arah putaran motor berlawanan arah jarum jam.
joss.. penjelasan simple, namun memahamkan. makasih sharing nya.
BalasHapusterimakasih banyak sudah berkunjung......
Hapus